디지털 트윈의 개념과 발전 방향
글 : 손지연 박사(한국전자통신연구원) / jyson@etri.re.kr
디지털 트윈에 대한 개념은 사람마다 보는 시각에 따라 인식 차이가 크다. 그러다 보니 디지털 트윈의 범위도 단순 모니터링에서 시뮬레이션 예측/검증/해석뿐 아니라 제어에 이르기까지 광범위하다. 그러나 이를 어느 특정 범위로 한정 짓기보다는 계속 진화하는 기술로서 인식하고, 현실 세계의 다양한 문제들을 가상공간에서 풀어내기 위해 지속 발전시켜 나가는 것이 더욱 의미가 있을 것이다.
이러한 취지로 ‘제조디지털트윈연구회’는 디지털 트윈이 현재 가지고 있는 기술적 한계와 연구 이슈를 도출하고, 산업 적용 확대를 위한 학문적 발전과 기술 협력을 도모하고자 발족되었다. 본 고에서는 본격적인 연구회 활동에 앞서 디지털 트윈의 기본 개념과 기술 발전 방향에 대해 살펴보고자 한다.
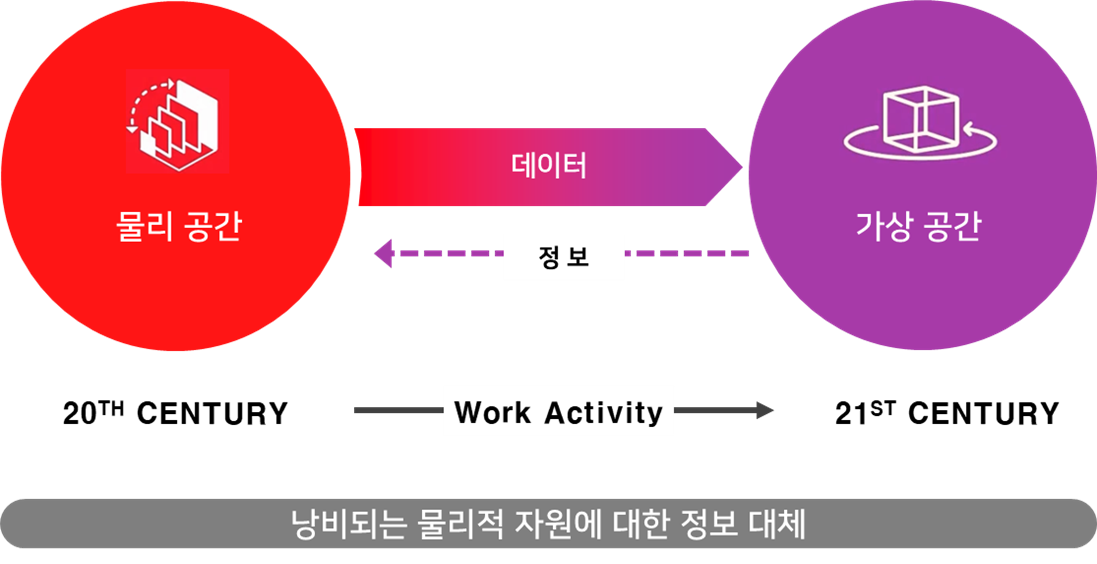
디지털 트윈은 물리 세상에 존재하는 개체에 대한 디지털화된 복제본으로, 현장에서 수집된 데이터를 기반으로 가상환경에서 다양한 시뮬레이션이나 분석을 통해 예측 판단 및 제어를 가능하게 하는 기술이다. 디지털 트윈 개념을 처음 제안한 마이클 그리브스 박사는 “20세기에는 대부분의 작업 활동이 주로 물리 공간에서 이루어져 왔지만, 향후 21세기는 대부분의 작업이 가상공간에서 이루어질 것이다“라고 전망하고 있다. 이렇게 되면, 제품 설계에서부터 생산, 유통, 서비스에 이르기까지 전주기 제조 활동의 상당 부분이 가상공간에서 이루어지면서, 이를 통해 자원의 낭비도 대폭 줄일 수 있을 것으로 생각된다.
< 디지털 트윈 개념 >
*출처: Michael Grieves, KEYSIGHT WORLD 2022.
디지털 트윈은 이미 2000년대 초반에 PLM의 이상적인 모델로서 제시된 개념이다. 그럼에도 디지털 트윈의 기반이 되는 센서나 IoT, 인공지능 등의 요소 기술들이 거의 동시다발적으로 발전하면서 최근 디지털 트윈이 다시 부상하고 있다. 특히 초소형 정밀(MEMS, Micro Electro Mechanical Systems) 센서 가격 추이를 보면, 최근 10년 동안의 센서 가격이 1/3 이하로 하락하였고, 그만큼 데이터 취득을 위한 단가가 내려가고, 정확도는 높일 수 있게 되면서 실제 산업에 적용할 수 있는 수준까지 올라오게 된 것이 그 배경이라고 할 수 있을 것이다.
제조 산업은 그중에서도 디지털 트윈 도입에 따른 부가가치가 가장 큰 산업으로 추정되고 있다. 인더스트리 4.0, 제4차 산업 혁명을 기점으로 기존의 대량생산 중심에서 다양한 소비자 요구를 충족시키는 개인화 생산으로 제조의 패러다임이 변화되고 있고, 이는 2020년 코로나 팬데믹으로 인해 온라인 소비, 롱테일 시장이 커지면서 더욱 가속화되고 있다. 이에 따라 제조 시스템 역시 과거의 전용 제조라인 시대에서 이제는 다양한 제품 모델·사양을 유연하게 제조하면서도 높은 생산 효율을 내는 지능형 디지털 제조 시대로 진화하고 있다. 디지털 트윈 기술은 이러한 지능형 디지털 제조 시대를 구현하기 위한 핵심 동인(driver)으로써, 설계에서 서비스에 이르는 제조 각 단계에 적용되어 유연성과 효율성을 높일 뿐 아니라, 에너지와 자원의 낭비를 줄이는 역할을 하게 될 것으로 본다.
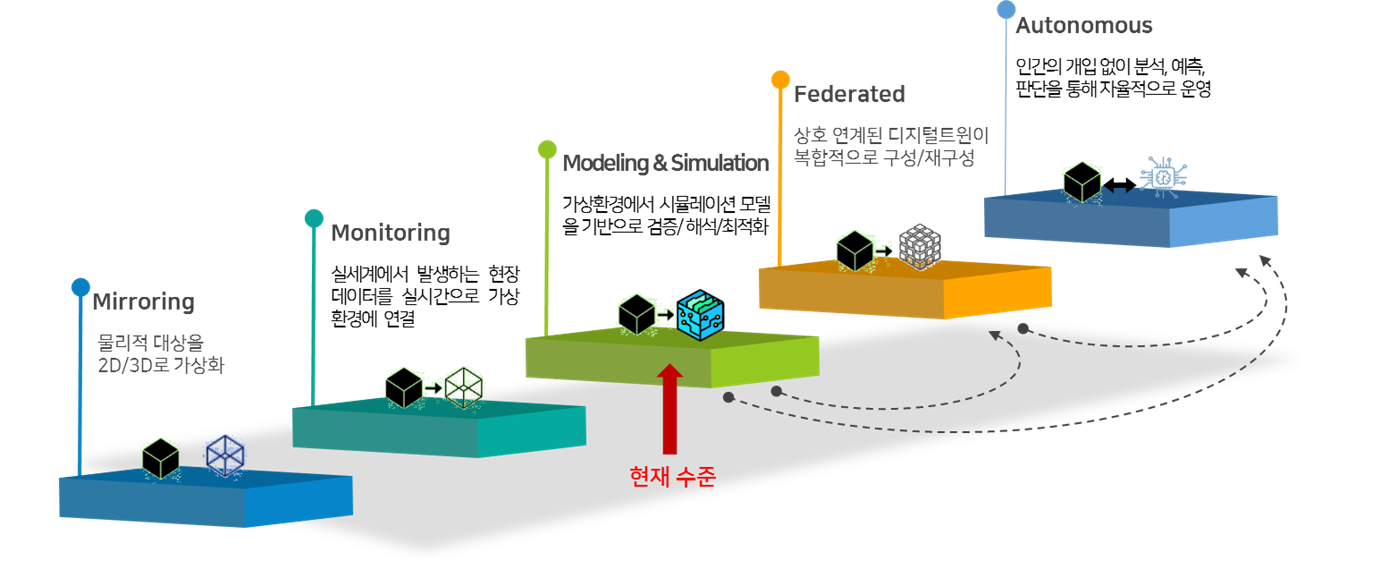
디지털 트윈 기술의 발전은 실-가상세계를 연결하는 연결형 트윈에서 지능형 트윈, 자율형 트윈으로 진화할 것으로 전망되며, 상세하게는 아래 그림과 같이 미러링 > 모니터링 > 시뮬레이션 > 연합> 자율형 트윈과 같이 5개의 발전 단계로 구분될 수 있다.
*출처: 정보통신기획평가원 자료 재구성(2021)
그러나, 이렇게 디지털 트윈의 기술 수준을 정의한다고 하더라도, 각 단계가 순차적으로 발전한다고 볼 필요는 없으며, 목적에 따라 적절한 수준의 트윈을 구현하기 위한 참조 모델로 인식하면 될 것이다.
현재는 디지털 트윈이 주로 현장에서 발생하는 데이터를 원격에서 모니터링 하거나, 가상 시뮬레이션을 통해 분석/예측/해석하는 데 주로 활용되고 있다. 그러나, 가상 시뮬레이션과 실제 환경 간의 오차는 실 환경에서의 오동작 문제로 이어질 수 있고, 응용에 따라서는 산업 재해, 안전사고와 같은 심각한 문제를 일으킬 수 있다. 시뮬레이션 모델을 고정밀화해서 오차를 줄여나갈 수도 있지만, 이는 너무 많은 시간과 비용, 그리고 방대한 컴퓨팅 파워를 요구한다. 이러한 이유로 현재는 디지털 트윈을 통해 물리적 대상을 직접 제어하기보다는, 의사결정을 지원하는 수준에 그치고 있다. 그러나, 향후 가상공간에서 예측하고 판단한 결과를 빠르게 물리 공간에 적용하기 위해서는 실-가상 오차를 최소화하는 방안들이 연구되어야 한다.
또 다른 연구 주제로는 디지털 트윈의 확장성 결여 문제가 있다. 현재 디지털 트윈은 목적에 따라서 사일로 식으로 독자 개발되고 있어 디지털 트윈 간에 서로 호환되지 않고, 재활용성도 거의 없다. 이러다 보니, 목적이 바뀔 때마다 새로운 트윈을 개발해야 하고, 이에 따른 시간과 비용이 지속해서 늘어날 수밖에 없다. 이러한 확장성 문제 해결을 위해서는 디지털 트윈이 구조적으로 쉽게 통합⸱확장할 수 있는 아키텍처가 필요하다. 실세계인 현장에서도 다수의 제조 장비가 모여서 설비/공정과 생산라인 또는 제조셀이 구성되고, 이들이 모여서 공장이 되는 구조이다. 가상공간에서도 이와 유사하게 다수의 장비 트윈을 조합해서 설비/공정/생산라인 트윈을 만들 수 있도록 하고, 이들 생산라인 트윈을 활용해서 공장 트윈을 구성할 수 있도록 한다면, 대규모의 확장성도 제공할 수 있지 않을까? 이렇게 구조적으로 쉽게 통합⸱확장을 하려면, 우선 디지털 트윈의 기본 단위에 대한 표준적 모델 정의가 필요하다. 뿐만 아니라, 다양한 목적의 시뮬레이션을 동시 실행하거나 물리 해석이 조금만 복잡해져도 컴퓨팅 시간이 기하급수적으로 증가하므로 거대/복잡 시스템에 대한 고속 시뮬레이션이나 분산 컴퓨팅 기술에 관한 연구도 이루어져야 할 것이다.
ETRI에서는 이러한 디지털 트윈의 실-가상 오차 문제와 확장성에 대한 기술적 한계 극복을 위한 연구를 수행하고 있으며, 관련해서 단위 트윈에 대한 표준모델의 개념 정립과 재구성 가능한 트윈 아키텍처 개발, 국제 표준화를 추진 중이다.
그 외에도 디지털 트윈이 실제 산업 현장에 적용되기 위해서는 넘어야 할 많은 기술적 걸림돌이 있을 것으로 본다. 연구회 활동은 이제 시작인 만큼 연구소와 대학, 산업체가 협력하여 현장의 문제에 대한 해법을 제시하고, 성과들을 낼 수 있도록 학회 회원 여러분들의 많은 관심과 참여를 부탁드린다.