
자율비행 드론
기반의 원격 유지보수 계획
시설 유지보수는 산업 현장에서의 물리적 자산 및 인프라를 지속적으로 관리, 정비, 및 유지하는 과정을 의미한다. 산업시설의 안전하고 효과적인 운영을 위해 다양한 작업들이 수행되지만, 고압 용기나 보일러와 같은 잠재적 위험이 있는 시설을 직접 점검하거나, 사람이 쉽게 접근하기 위해 고비용의 비계를 설치하는 것은 비효율적이다. 이에 따라 많은 연구에서는 산업시설의 유지보수를 위해 드론을 활용하는 방안을 탐구해왔다. 그러나 대부분의 연구는 GPS를 사용할 수 있는 실외 공간으로 한정되어 있거나, 전문가가 직접 현장을 방문하여 드론을 수동으로 제어하여 시설을 점검하는 방식으로 이루어지고 있다. 따라서 본 연구에서는 경로 계획 알고리즘을 적용한 자율비행 드론을 기반으로 원격 유지보수를 계획하는 시스템을 제안하고자 한다.
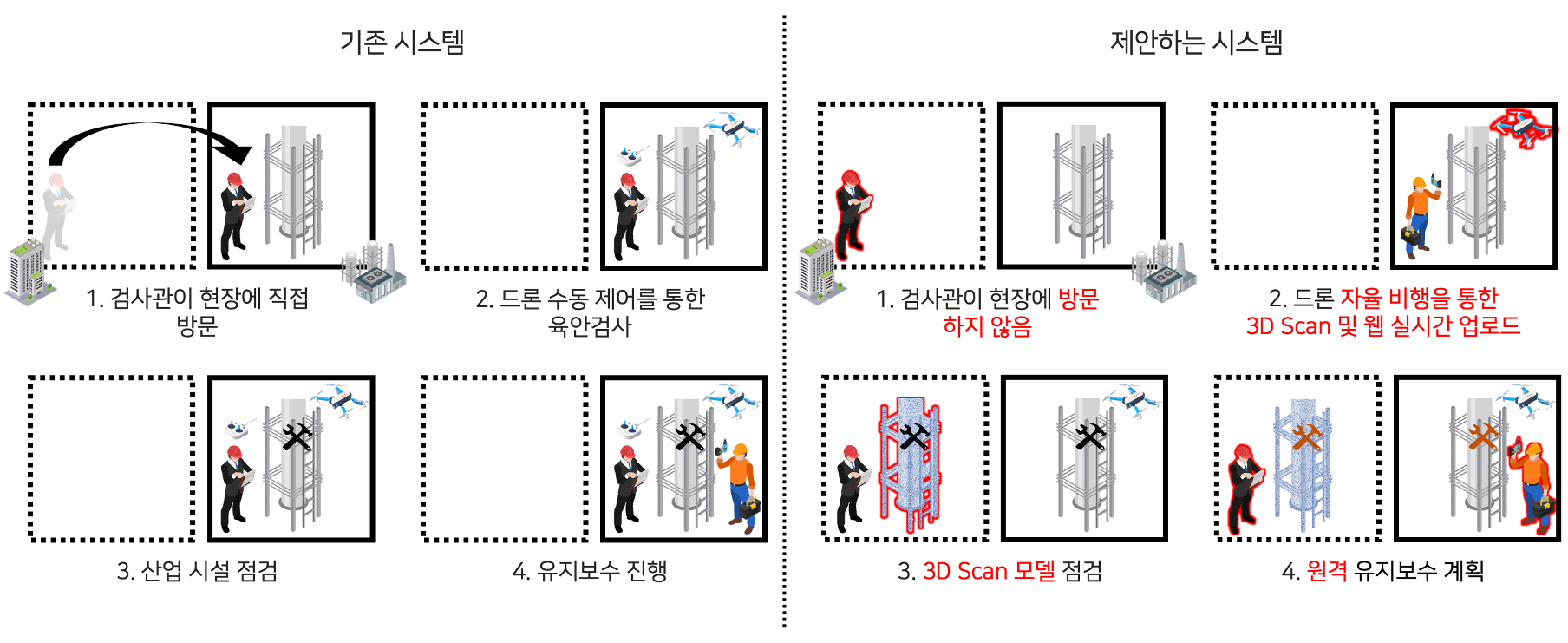
[그림 1] 드론을 이용한 유지보수 시스템 비교
그림 1은 드론을 활용한 기존의 유지보수 시스템과 새롭게 제안하는 시스템을 보여주고 있다. 기존 시스템에서는 검사관이 산업현장에 직접 방문하여 드론을 수동으로 제어하고, 드론에 부착된 카메라를 통해 검사를 수행한다. 검사 결과로 수리가 필요한 부분을 확인하면, 검사관과 현장 작업자가 해당 부분에 접근하여 수리를 진행한다.
본 연구에서 제안하는 시스템은 검사관이 현장에 직접 방문하지 않는다. 대신, 현장 작업자는 자율비행 드론을 이용해 작업공간을 3D 스캔하고 스캔 결과는 실시간으로 웹에 업로드된다. 검사관은 원격에서 웹을 통해 현장을 검사하고 원격 유지보수 계획을 수립할 수 있다.

[그림 2] 시스템에 사용된 기기
시스템에 사용된 기기는 드론, 컨트롤러, 서버로 구성되어 있다. 드론은 3D
스캔을 위해 iPhone과 iPhone 홀더가
부착되어 있으며, 이를 통해 드론이 바라보는 방향을 스캔하고 그 결과를 실시간으로 웹에 업로드한다. 컨트롤러는 iPad와 연결되어 드론의 현재 위치를 수신하고 드론의
정밀한 제어를 수행한다. 서버는 드론의 iPhone이 취득한
데이터를 실시간으로 웹에 업로드하고 Path Planning 알고리즘을 실행하여 드론의 경로를 계산한다.
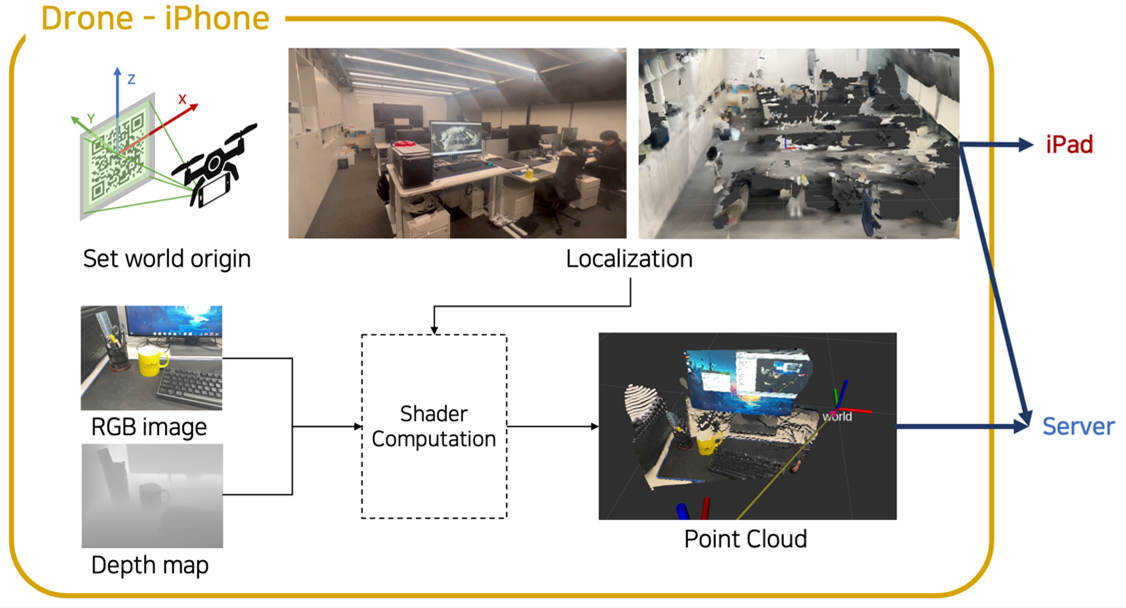
[그림 3] Drone – iPhone 구현
드론에 부착된 iPhone의 주요 역할은 드론의 위치를 계산하고, 드론이 바라보는 방향을 3D 스캔하는 것이다. 이를 위Apple이 제공하는 ARKit 프레임워크를 활용하였다. 먼저, 현장에 QR코드를 부착하고, iPhone은 이 QR코드를 인식하여 드론 좌표계의 원점으로 설정한다. iPhone은 내장된 라이다 센서, 카메라, IMU센서 등을 활용하여 드론 좌표계에서의 iPhone의 현재 위치를 계산하고, 이를 드론의 위치로써 사용한다. 이렇게 취득한 드론의 위치 데이터는 iPad 및 서버로 실시간으로 전송되어 활용된다.
iPhone의 라이다 센서와 카메라를 통해 얻은 RGB 이미지와 깊이 맵(Depth map)은 Point Cloud를 생성하는데 활용된다.이렇게 생성된 Point Cloud는 서버로 실시간으로 전송되어 활용된다.
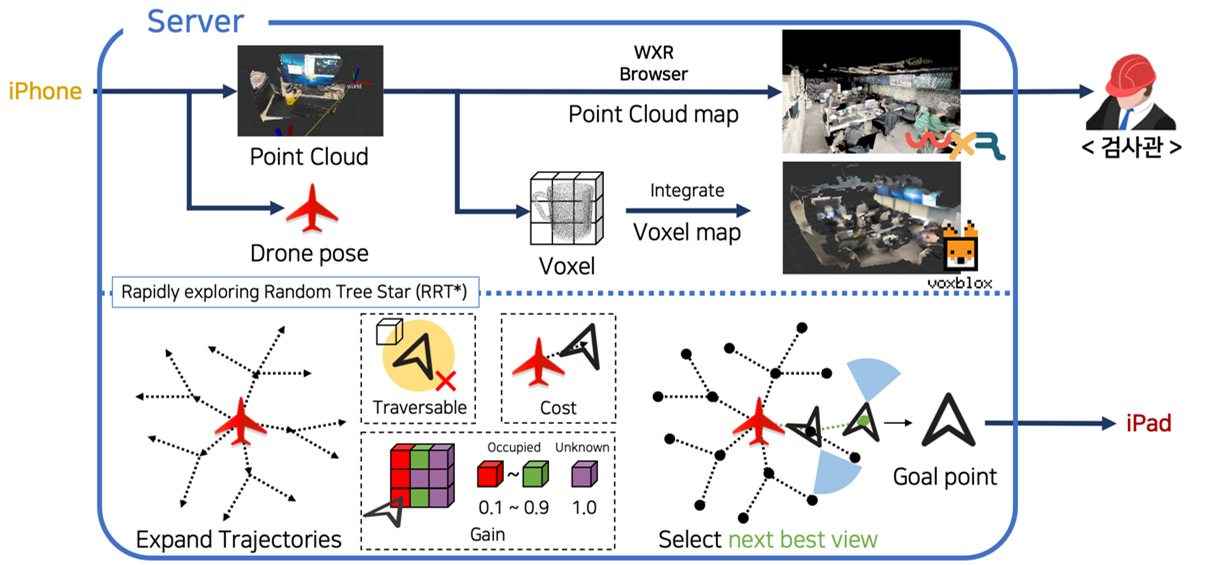
[그림 4] Server 구현
서버의 주요 역할은 3D 스캔한 데이터를 웹에 업로드하고 이를 기반으로 Path Planning 알고리즘을 실행하는 것이다. 드론의 iPhone로부터 수신한 Point Cloud는 웹을 기반으로 한 XR 플랫폼인 WXR(Webized-XR)브라우저에 업로드된다. 검사관은 원격으로 웹을 통해 산업시설의 검사를 진행하게 된다.
스캔된 대용량의 Point Cloud는 Voxel로 변환되어 Voxel 맵에 통합되고, 용량이 비교적 낮은 Voxel 맵에서 Path Planning 알고리즘이 실행된다. 이러한 알고리즘은 RRT*(Rapidly exploring Random Tree Star)와 같은 샘플링 기반의 경로 계획 알고리즘을 활용해 구현했다. 알고리즘의 결과로 생성된 Goal Point는 iPad에 전송된다.
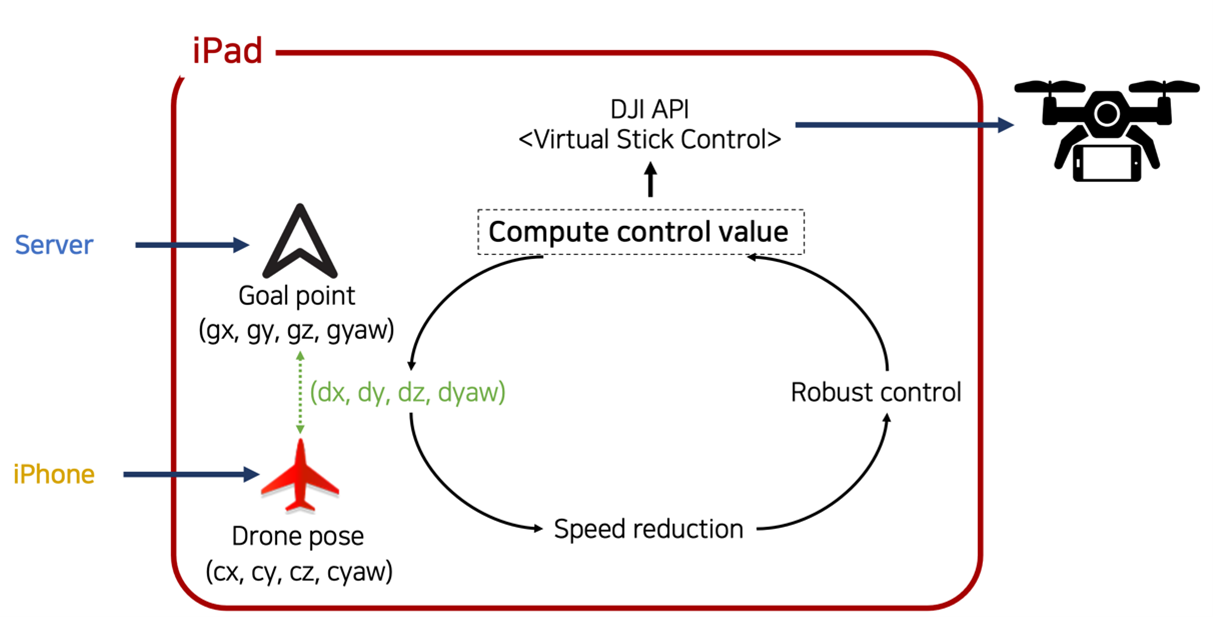
[그림 5] iPad 구현
iPad의 주요 역할은 드론이 Goal Point로 신속하고 정확하게 이동할 수 있도록 제어하는 것이다. 서버와 iPhone로부터 드론의 현재 위치와 목표 지점을 실시간으로 수신하여 두 위치 간의 차이를 계산한다. 이 차이를 기반으로 드론의 제어 값을 계산하는데, 이 과정에서 PID 제어와 같은 Speed reduction과 Robust Control을 활용하여 안정적이고 빠른 도착을 보장한다. 또한, 계산된 제어 값은 20Hz의 주기로 드론에게 전달되어 드론이 Goal Point에 도달할 수 있도록 한다.
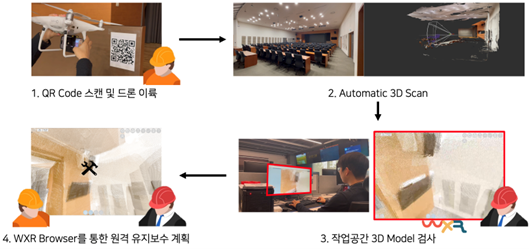
[그림 6] 시스템 전체 프로세스
그림 6은 시스템의 전체 프로세스를 간략하게 보여주고 있다. 먼저 현장 작업자는 산업시설에 QR코드를 붙이고 이를 스캔하여 원점을 설정한다. 원점을 설정한 이후 드론을 이륙하고 자동 3D 스캔이 시작된다. 스캔이 진행되는 동안 데이터가 실시간으로 웹에 업로드되며, 검사관은 웹을 통해 현장의 상황을 파악하고 검사를 진행할 수 있다. 만약 검사 결과 수리가 필요한 부분이 확인된다면, 현장 작업자와 해당 부분의 유지보수를 계획하는 것으로 프로세스가 완료된다.
저는 본 연구를 통해 지난 2024년 CDE 동계 학술대회에서 우수논문상을 수상하게 되었고 이를 매우 영광으로 생각합니다. 앞으로도 지속적인 연구와 학습을 통해 사회에 긍정적인 영향을 끼치는 데 노력할 것입니다. 이번 수상에 이르게 된 기회를 제공해준 CDE 동계 학술대회와 심사위원들에게 깊은 감사의 말씀을 드립니다. 앞으로도 더 많은 발전과 성장을 이루어 나갈 것임을 약속드립니다. 감사합니다.
대표이사: 유병현 / 사업자등록번호: 220-82-60063
Copyright© 2023. Society for Computational Design and Engineering. All rights