
자율운항선박은 사람의 개입 없이 자동화된 시스템을 활용하여 운항하는 선박이다. 자율운항선박에서는 기존에 사람이 수행하던 주변 상황에 대한 인지, 운항에 필요한 판단, 그리고 제어를 대체할 수 있는 자율화 소프트웨어가 핵심적인 역할을 수행하며, 그 중요성이 더욱 부각되고 있다. 지난 몇 년 동안 인공지능의 발전은 여러 산업 분야에 혁신적인 변화를 가져왔다. 특히, 자율운항선박 기술은 인공지능과의 결합을 통해 급격히 발전하고 있다. 사람이 경험에 의존해 내리는 의사 결정 과정을 인공신경망으로 대체하여 작업 환경을 개선할 뿐만 아니라, 데이터 기반의 예측과 의사 결정을 지원하여 선박 운항의 안전성과 효율성을 향상시킬 수 있다. 또한, 선박의 운항 기록을 분석하여 운영 효율성을 개선할 수 있으며, 상태를 모니터링하고 예측하여 선박의 유지보수 효율성을 높일 수 있게 된다. 이처럼 인공지능 기술은 다양한 측면에서 선박 운영 및 운항의 안전성과 효율성을 높일 수 있으며, 조선해양 산업 또한 더욱 발전시킬 것으로 보인다. 다음 장에서는 자율운항선박의 안전한 운항을 위한 인공지능 기술의 자율화 소프트웨어 적용 사례 몇가지를 소개한다.
1. AI를 활용한 영상 기반 주변 인식 연구[1][2]
선박의 주변 상황 인지를 위해 사람의 시각을 대체할 수 있는 카메라를 활용하여 주변 장애물을 탐지하고 추적하는 인지 기술을 연구하였다. 이 연구에서는 CNN (Convolutional Neural Network)을 사용하여 카메라 영상 내에서 객체를 탐지하고, 위치를 파악한 후 장애물을 추적하였다. 먼저, 장애물의 탐지를 위해 YOLO 모델을 사용하여 탐지 정확도를 높였다. 또한, 해상 장애물의 학습 데이터 셋이 부족하다는 점을 보완하기 위해 가상 현실을 활용하여 해상 장애물의 이미지 데이터 셋을 구축하였다. 그 결과 광학 이미지와 열화상 이미지에 대하여 높은 정확도를 얻을 수 있었다.
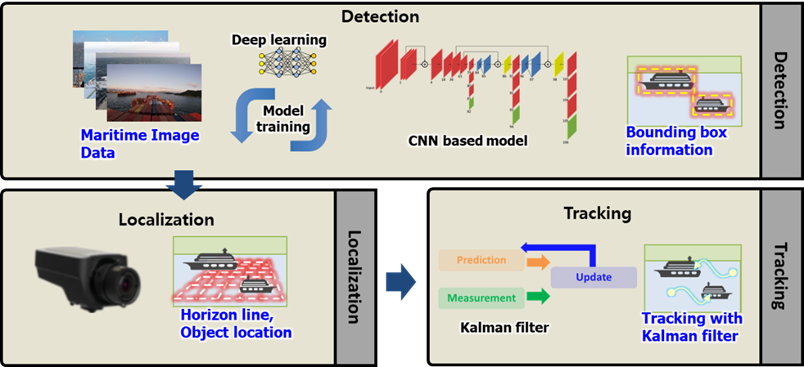
카메라 영상 내에서 장애물을 탐지하였다면, 이를 3차원 공간으로 변환하여 장애물의 실제 위치를 계산해야 한다. 해상 장애물의 경우 해수면에 접해있다는 단서가 있기 때문에, 카메라 상에서 보이는 수평선과의 거리를 통해 정확한 위치를 계산하였다. 실제 장애물의 GPS와 카메라 영상을 통해 추적한 결과를 비교해보았을 때 평균적인 위치 오차가 약 10 m 내외로 나타났다. 이는 선박에서 장애물 탐지에 사용하는 다른 센서들을 충분히 대체할 수 있을 만한 정확도이며, 카메라 영상이 인공신경망을 통해 장애물을 인지하는데 충분히 활용될 수 있다는 것을 보여준다. 하지만 카메라의 특성상 가려짐 (occlusion)이 발생할 수 있으며, 심한 안개 등 기상 상황에 영향을 많이 받기 때문에 다른 센서와의 융합을 통한 개선이 필요할 것으로 보인다.
카메라 영상은 다양한 시각 정보를 담고 있다. 이를 잘 활용한다면 단순히 장애물의 위치뿐만 아니라, 장애물의 종류나 크기 등의 추가적인 정보를 얻을 수 있다. 사람이 이미지를 보았을 때 이러한 정보를 자연스레 얻는 것처럼, 인공지능을 활용하여 영상 내의 다양한 시각적 정보를 자동으로 추출할 수 있도록 한다면 선박 운항에 다양하게 활용할 수 있을 것이다. 앞선 연구와 같이 탐지한 장애물을 대상으로 인공신경망을 통해 간단하게 선종을 분류하는 연구를 수행하였다. 기존에도 인공신경망을 통해 선박의 이미지를 분류하려는 시도는 있어왔지만, 선박 데이터 셋의 크기가 충분하지 않거나, 선박의 종류가 다양하지 않거나, 위성 사진 형태의 이미지로 되어있어 자율운항선박이 운항 중 얻는 영상과는 괴리가 있었다. 따라서 선박이 운항 중 얻는 카메라 영상으로 데이터 셋을 구축하고, 인공신경망을 학습시켜 적용해보았다. 그 결과 벌크선 (bulk carrier), 컨테이너선 (container ship), 액체 화물 운반선 (tanker), 크루즈선 (cruise ship), 구축함 (naval surface ship), 예인선 (tug boat), 그리고 부표 (buoy)로 외형적인 특징이 명확히 드러나는 7종의 선박 및 장애물에 대해 높은 정확도로 분류하는 것을 확인하였다.
2. AI를 활용한 충돌 회피 제어 연구[3]
복잡한 해상에서의 자율운항선박의 안전한 운항을 위해 심층강화학습을 통해 자선의 경로 및 속도를 제어하는 충돌 회피 기법을 연구하였다. 다수의 선박이 만나는 복잡한 동적 시스템을 정식화하여 푸는 대신 학습을 통해 주변 상황과 상호작용하여 최적의 제어를 수행할 수 있도록 하는 심층강화학습을 적용하였다. 여러 척의 타선을 동시에 고려하기 위해 센서로부터 얻은 주변 타선 정보를 2차원 그리드로 변환하여 강화학습의 상태로 설정하였다. 그리고, 타선과의 조우 상황에 따라 안전하게 충돌을 회피하도록 규정하는 COLREGs를 준수하고, 충돌 회피 수행 여부를 타선에게 명확하게 인지시키며, 갑작스러운 상황 변화에도 유연하게 대처할 수 있도록 보상을 주어 명확하게 알고리즘을 정식화하기 어려운 특성들도 만족할 수 있도록 강화학습모델의 보상 체계를 구성하였다.
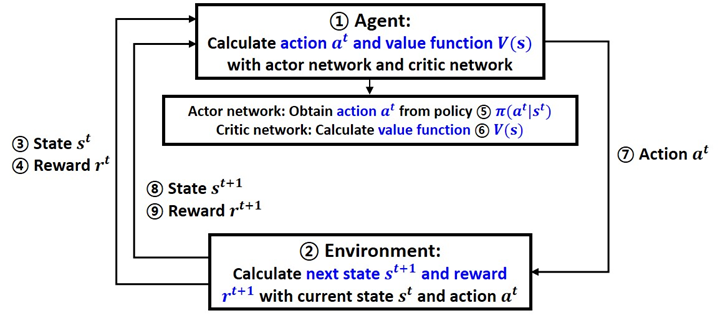
개발된 강화학습 기반 충돌 회피 알고리즘을 선박의 각 조우 상황에 적용하고 검증한 결과 학습이 충분히 진행된 이후 자선이 타선과의 충돌을 회피하여 목적지에 도착하는 것을 확인하였으며, COLREGs 규칙을 준수하여 우현 변침하는 것을 확인하였다.
앞에서 소개한 연구들에서 볼 수 있듯이, 자율운항선박과 인공지능의 결합은 현대 조선해양산업에 혁신적인 변화를 가져오고 있다. 앞으로 인공지능을 활용한 자율운항선박 기술의 꾸준한 발전을 통해 더욱 안전하고 효율적인 선박 운항을 실현할 수 있을 것이다.
■참고문헌
[1] Won-Jae Lee, Myung-Il Roh, Hye-Won Lee, Jisang Ha, Yeong-Min Cho, Nam-Sun Son, “Detection and Tracking for the Awareness of Surroundings of a Ship Based on Deep Learning”, Journal of Computational Design and Engineering, Vo. 8, No. 5
[2] 남권우, 노명일, 이혜원, 이원재, "자율 운항 선박을 위한 딥 러닝 기반 선박 이미지 분류 방법", 한국CDE학회 논문집, Vol. 26, No. 2, pp. 144-153, 2021.06.01
[3] Do-Hyun Chun, Myung-Il Roh, Hye-Won Lee, Jisang Ha, Donghun Yu, “Deep Reinforcement Learning-based Collision Avoidance for an Autonomous Ship”, Ocean Engineering, Vol. 234, pp. 1-20, 2021.08.15
대표이사: 유병현 / 사업자등록번호: 220-82-60063
Copyright© 2023. Society for Computational Design and Engineering. All rights